触发器规则
虽然正常的工作流是在任务的所有直接上游任务都成功时触发任务,但Airflow允许进行更复杂的依赖关系设置。
所有的operators都有一个trigger_rule参数,它定义了生成的任务被触发的规则。 trigger_rule参数的默认值是all_success,定义为“当所有直接上游任务成功执行完成时触发此任务”。这里描述的所有其他规则都基于直接的父任务,并且这些值可以在创建任务时传递给任何operator:
- all_success: 所有父任务被成功执行(默认)
- all_failed:所有父任务处于failed 或者 upstream_failed 状态
- all_done:所有的父任务都完成了他们的执行
- one_failed:当至少有一位父任务失败后会触发,不会等待所有父任务完成
- one_success:当至少有一位父任务成功后会触发,并不等待所有的父任务完成
- dummy:依赖关系仅用于显示,随意触发
请注意,这些可以与depends_on_past(boolean)一起使用,当设置为True时,如果任务的上一个schedule计划未成功,则会阻止任务被触发。
仅运行最新的schedule
标准工作流程行为针对特定日期/时间范围运行一系列任务。但是,某些工作流执行独立于运行时间的任务,但需要按计划运行,与标准cron作业非常相似。这些情况下,在暂停期间回填或运行未命中的作业只会浪费CPU周期。
对于这种情况,您可以使用LatestOnlyOperator跳过在DAG的不在最近一次计划运行期间运行的任务。如果现在的时间不在其执行时间和下一个计划的执行时间之间,LatestOnlyOperator将跳过所有即时下游任务及其本身。
必须注意跳过的任务和触发规则之间的交互。任务跳过将传递通过这些触发规则:all_success和all_failed,all_done,one_failed,one_success和dummy不传递。如果您想使用带有不会传递跳转的触发器规则的LatestOnlyOperator,则需要确保LatestOnlyOperator直接位于您要跳过的任务的上游。
通过使用触发规则可以混合以典型的日期/时间依赖模式运行的任务和使用LatestOnlyOperator的任务。
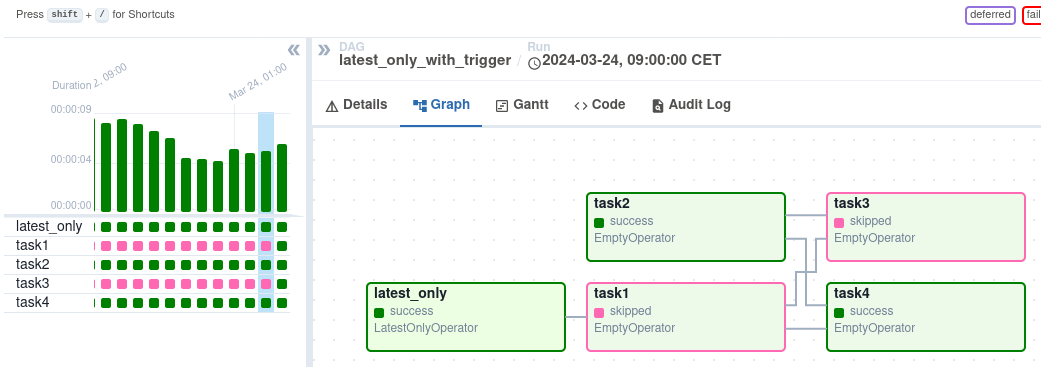
例如,请考虑以下dag:#dags/latest_only_with_trigger.py
import datetime as dt
from airflow.models import DAG
from airflow.operators.dummy_operator import DummyOperator
from airflow.operators.latest_only_operator import LatestOnlyOperator
from airflow.utils.trigger_rule import TriggerRule
dag = DAG(
dag_id='latest_only_with_trigger',
schedule_interval=dt.timedelta(hours=4),
start_date=dt.datetime(2016, 9, 20),
)
latest_only = LatestOnlyOperator(task_id='latest_only', dag=dag)
task1 = DummyOperator(task_id='task1', dag=dag)
task1.set_upstream(latest_only)
task2 = DummyOperator(task_id='task2', dag=dag)
task3 = DummyOperator(task_id='task3', dag=dag)
task3.set_upstream([task1, task2])
task4 = DummyOperator(task_id='task4', dag=dag,
trigger_rule=TriggerRule.ALL_DONE)
task4.set_upstream([task1, task2])
在这个dag的情况下,latest_only任务将把除最近运行以外的所有运行显示为跳过的状态。 task1直接位于latest_only的下游,并且也会跳过除最新版本之外的所有运行。 task2完全独立于latest_only,并将在所有预定时段运行。 task3位于task1和task2的下游,并且由于默认的trigger_rule为all_success,因此将从task1接收传递跳过。 task4位于task1和task2的下游,但由于其trigger_rule设置为all_done,只要task1被跳过(一个有效的完成状态)并且task2成功,它就会立即触发。